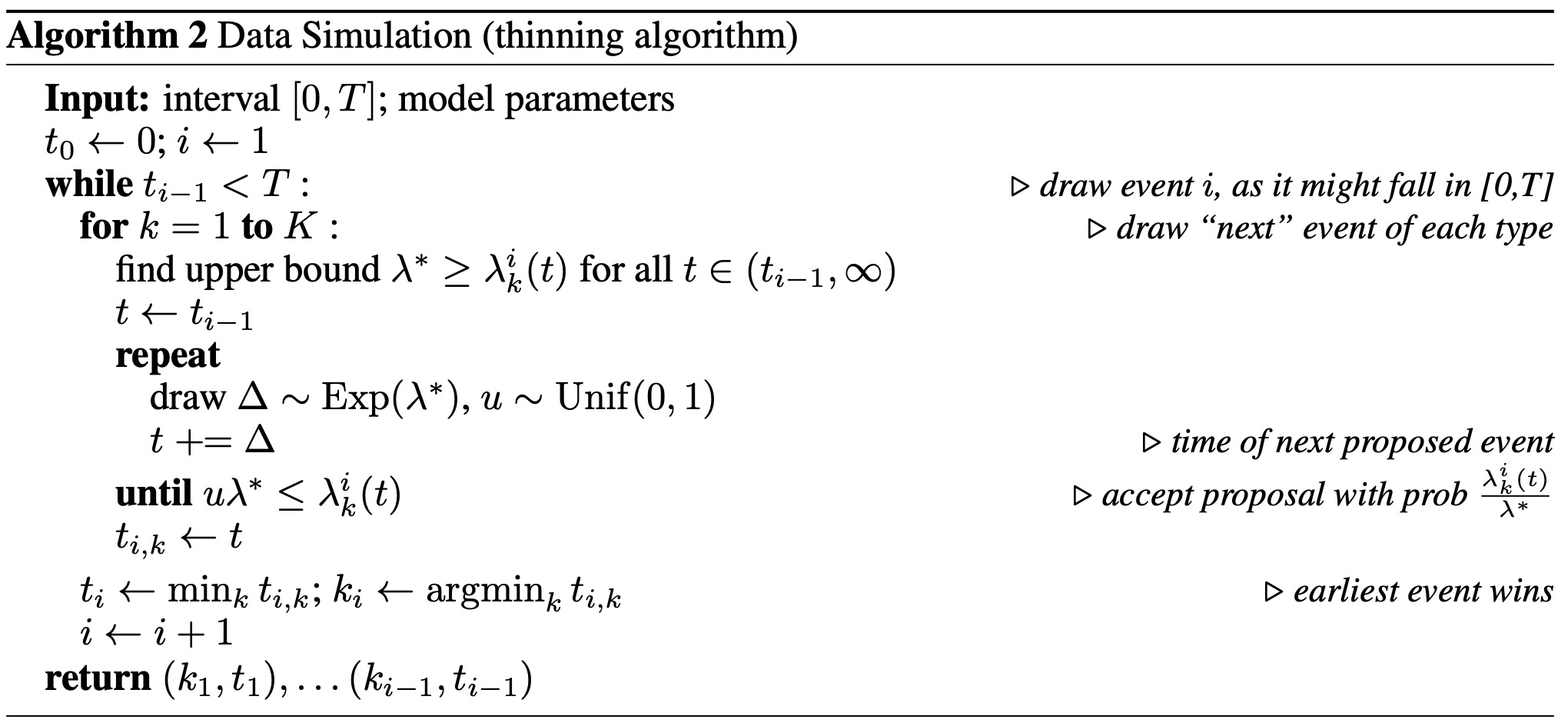
Thinning Algorithm for Sampling Event Sequence
In EasyTPP we use Thinning algorithm depicted in Algorithm 2
in The Neural Hawkes Process: A Neurally Self-Modulating Multivariate Point Process
for event sampling.
The implementation of the algorithm
We implement the algorithm both in PyTorch and Tensorflow, as seen in ./model/torch_thinning.py and ./model/tf_thinning.py, which basically follow the same procedure.
The corresponding code is in function draw_next_time_one_step, which consists of the following steps:
Compute the upper bound of the intensity at each event timestamp in function
compute_intensity_upper_bound, where we sample some timestamps inside event intervals and output a upper bound intensity matrix [batch_size, seq_len], denoting the upper bound of prediced intensity (for next time interval) for each sequence at each timestamp.Sample the exponential distribution with the intensity computed in Step 1 in function
sample_exp_distribution, where we simply divide the standard exponential number with the intensity, which is equivalent to sampling with exp(sample_rate), according to the properties of Exponential Distribution. The exponential random variables have size [batch_size, seq_len, num_sample, num_exp], where num_sample refers to the number of event times sampled in every interval and num_exp refers to number of i.i.d. Exp(intensity_bound) draws at one time in thinning algorithm.Compute the intensities at the sample times proposed in Step 2, with final size [batch_size, seq_len, num_sample, num_exp].
Sample the standard uniform distribution with size [batch_size, seq_len, num_sample, num_exp].
Perform the acceptance sampling with certain probability in function
sample_accept.The earliest sampling dtimes are accepted. For unaccepted sampling dtimes, use boundary/maxsampletime for that draw.
The final predicted dtimes has size [batch_size, seq_len, num_sample], which refers to the sampling dtimes for each sequence at each timestamp, along with an equal weight vector.
The product of the predicted dtimes and the weight is the final predicted dtimes, with size [batch_size, seq_len].
One-step prediction
By default, once given the parameters of thinning algo (defining a thinning config as part of model_config), we perform the one-step prediction in model evaluation, i.e., predict the next event given the prefix. The implementation is in function prediction_event_one_step in BaseModel (i.e., TorchBaseModel or TfBaseModel).
Multi-step prediction
The recursive multi-step prediction is activated by setting num_step_gen to a number bigger than 1 in the thinning config.
Be noted that, we generate the multi-step events after the last non-pad event of each sequence. The implementation is in function predict_multi_step_since_last_event in BaseModel (i.e., TorchBaseModel or TfBaseModel).
thinning:
num_seq: 10
num_sample: 1
num_exp: 500 # number of i.i.d. Exp(intensity_bound) draws at one time in thinning algorithm
look_ahead_time: 10
patience_counter: 5 # the maximum iteration used in adaptive thinning
over_sample_rate: 5
num_samples_boundary: 5
dtime_max: 5
num_step_gen: 5 # by default it is single step, i.e., 1